
(a) Knowledge Media Research Center, Tübingen, Alemania
(b) Dept. de Personalidad, Evaluación y Tratamientos Psicológicos, Universidad Complutense de Madrid, España

(cc) Rafa2010.
¿Cómo funciona el sistema cognitivo cuando debe realizar dos tareas simultáneamente? Los modelos de cuello de botella proponen que se puede realizar solamente una selección de respuesta a la vez. El estudio de Ulrich y cols. (2006) sugiere que tampoco se puede realizar más de una ejecución motora simultáneamente. Es decir, existen dos cuellos de botella en el sistema, uno cuando se selecciona y otro cuando se ejecuta la respuesta. Estos resultados pueden ayudar a aumentar la seguridad en tareas de riesgo, además de a optimizar recursos, aumentando la eficiencia, a la hora de realizar tareas complejas.
En nuestro día a día, a menudo nos encontramos en situaciones en las que tenemos que hacer varias cosas simultáneamente, en ocasiones más de las que se puede. Por ejemplo, tratar de escribir un correo electrónico mientras se habla por teléfono. Probablemente dejaríamos de escribir el correo hasta dar por terminada la conversación o, en el caso de que intentásemos realizar las dos tareas simultáneamente, el resultado sería peor o más lento que si hiciésemos cada tarea por separado. Estas interferencias, que pueden ser inocuas en el caso expuesto, pueden también tener graves consecuencias en otras situaciones. Por ejemplo, en el caso de conductores de vehículos, pilotos, controladores aéreos, o profesionales que manejan maquinaria industrial, en los que la realización de varias tareas a la vez es habitual, conocer el funcionamiento del sistema cognitivo en situaciones multitarea se antoja imprescindible.
Para estudiar las limitaciones cognitivas que se presentan cuando dos tareas deben ser ejecutadas simultáneamente, un paradigma comúnmente utilizado es el del “periodo refractario psicológico” (PRP, Pashler & Johnston, 1989). En este paradigma la segunda tarea (p.ej., presionar un botón en respuesta a un sonido) se presenta después de un corto intervalo temporal variable tras la primera tarea (p.ej., presionar otro botón en respuesta a una luz). Los resultados habituales muestran un aumento del tiempo de reacción de la segunda tarea conforme disminuye el intervalo temporal entre las dos tareas.
Tal aumento se suele explicar con los modelos de “cuello de botella” (CB). Estos modelos afirman que dos tareas no pueden ser ejecutadas de forma completamente simultánea, ya que ciertos procesos cognitivos realizan una sola operación cada vez, actuando como un CB. Asumen que cada tarea se compone de tres estadios de procesamiento: la percepción del estímulo, la selección de respuesta y finalmente la ejecución motora de la respuesta. El modelo estándar asume que el CB se da en la selección de respuesta, siendo imposible procesar simultáneamente la selección de respuesta de dos tareas y obligando así a posponer el procesamiento de la segunda tarea (Figura 1).
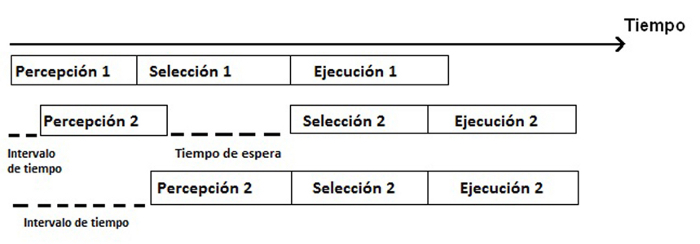
Figura 1.- Esquema del efecto PRP. Cada tarea tiene tres estadios de procesamiento: la percepción del estímulo al que se debe reaccionar, la selección de respuesta perteneciente al estimulo percibido y finalmente la ejecución motora de la respuesta seleccionada. La primera línea del esquema muestra los tres estadios de la primera tarea. La segunda línea muestra los estadios de la segunda tarea cuando el intervalo de tiempo entre la primera y la segunda tarea es pequeño. En este caso, cuando llega la segunda tarea al estadio de selección, el sistema tiene que esperar, ya que el estadio de selección de la primera tarea todavía no ha terminado. La tercera línea muestra qué sucede cuando el intervalo de tiempo entre la primera y la segunda tarea es grande. En este caso el estadio de selección de la primera tarea ha terminado y el estadio de selección de la segunda tarea puede comenzar sin tener que esperar. A esa diferencia en el “tiempo de espera” entre las dos tareas se la conoce como efecto PRP.
Aunque la gran mayoría de los estudios encuentran evidencia de ello, otro modelo sugiere que el CB se da tanto en la selección de respuesta como en la ejecución motora (De Jong, 1993). Sin embargo, los pocos resultados de los estudios realizados para comprobar este último modelo son ambiguos, ya que los diseños empleados no excluyen completamente influencias de procesos centrales (Pashler y Christian, 1994).
Ulrich y cols. (2006) han obtenido datos consistentes con la existencia de un CB en el estadio motor. En la primera tarea los participantes debían diferenciar dos tonos y, según el tono presentado, mover una palanca a uno de los dos extremos de un aparato. Los autores manipularon la duración de este movimiento usando un aparato compuesto por una palanca insertada en unos raíles, diseñado especialmente para eliminar cualquier influencia de procesos centrales (Figura 2). En la segunda tarea los participantes debían discriminar entre dos letras pulsando una tecla con el dedo índice o corazón de la mano derecha, según la letra presentada.
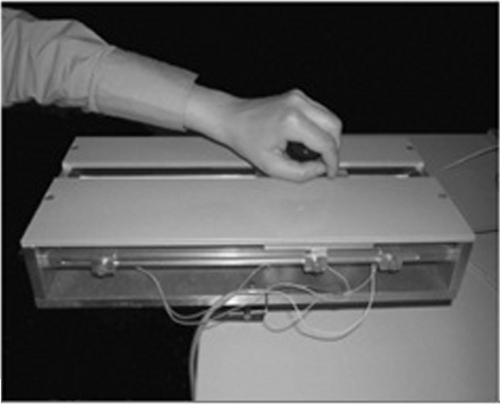
Figura 2.- Aparato utilizado en el estudio. La respuesta a la primera tarea consistía en mover con la mano izquierda una palanca sobre un raíl guía hacia uno de los dos extremos situados a distintas distancias de la posición de partida (una corta y la otra larga). Cuando el tono era agudo, los participantes debían llevar la palanca hasta el extremo más distante; si el tono era grave debían llevarla hasta el extremo más cercano (o viceversa en la otra mitad del experimento). Es importante destacar que cuando el participante iniciaba la ejecución de la primera tarea, la selección de respuesta ya había finalizado. Además, al tratarse de un movimiento guiado, la ejecución no necesitaba control visual simultáneo, reduciendo así a un mínimo posibles influencias de procesos de control central.
En estas condiciones, según el modelo estándar de CB, la ejecución motora de la segunda tarea no debería verse afectada por la duración de la ejecución motora de la primera tarea, ya que sólo los procesos centrales (pero no la ejecución motora) constituyen un cuello de botella. Por lo tanto, las manipulaciones que afectasen a procesos posteriores a la selección de respuesta en la primera tarea no deberían repercutir en la ejecución motora de la segunda tarea. Por el contrario, el modelo ampliado del CB, que sitúa un CB adicional en la ejecución motora, sí que predice un incremento en el tiempo de reacción a la segunda tarea cuando la primera tarea requiere un movimiento de larga duración.
Como puede apreciarse en la Figura 3, los resultados del estudio de Ulrich y cols. (2006) confirmaron las predicciones derivadas del modelo extendido del CB, demostrando que existe un segundo CB en la ejecución de la respuesta. En otro trabajo de Bratzke y cols. (2008) se confirmaron y extendieron los resultados anteriores utilizando reacciones de diferentes modalidades (i.e., respuesta manual y respuesta verbal). De acuerdo con estos resultados, parece que no sólo decidir lo que hacemos afecta el procesamiento de una segunda tarea, sino que lo que tardamos en ejecutar dicha respuesta también afecta a la segunda tarea.
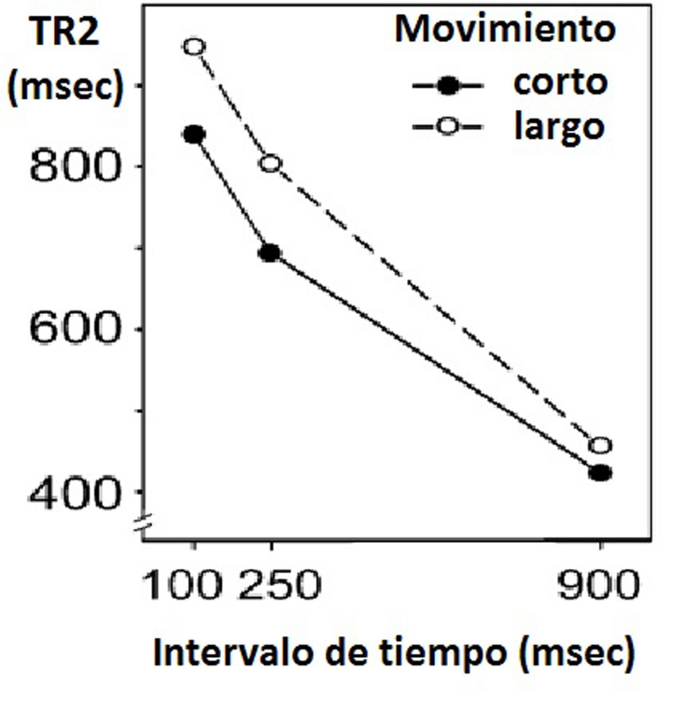
Figura 3.- Resultados del experimento. El tiempo de reacción a la segunda tarea es mayor cuando en la primera tarea los participantes tienen que realizar un movimiento largo que cuando tienen que realizar un movimiento corto. Esta diferencia aumenta cuando disminuye el intervalo de tiempo entre las dos tareas.
Estos resultados contribuyen a mejorar el conocimiento del funcionamiento del sistema cognitivo humano a la hora de realizar tareas múltiples. En el mundo actual, un objetivo común de todas las economías es el de aumentar la productividad, para lo cual es condición indispensable aumentar la eficiencia en la ejecución de las tareas. La incorporación de estos resultados en el mundo de la ingeniería puede ser de gran utilidad, ya que el estudio deja claro que a la hora de diseñar aparatos, maquinarias o vehículos, no es sólo más eficiente y más seguro minimizar las decisiones de lo que queremos hacer a continuación, sino también minimizar los componentes motores de las tareas que deben ser realizadas simultáneamente.
Referencias
Bratzke, D., Ulrich, R., Rolke, B., Schröter, H., Jentzsch, I., y Leuthold, H. (2008). Motor limitation in dual-task processing with different effectors. Quarterly Journal of Experimental Psychology, 61, 1385-1399.
De Jong, R. (1993). Multiple bottlenecks in overlapping task performance. Journal of Experimental Psychology: Human Perception and Performance, 19, 965-980.
Pashler, H., y Christian, C. (1994). Bottlenecks in planning and producing vocal, manual, and foot responses (Tech. Rep.). La Jolla, CA: University of California, San Diego, Center for Human Information Processing.
Pashler, H., & Johnston, J. (1989). Chronometric evidence for central postponement in temporally overlapping tasks. Quarterly Journal of Experimental Psychology, 41A, 19–45.
Ulrich, R., Ruiz Fernández, S., Jentzsch, I., Rolke, B., Schröter, H., y Leuthold, H. (2006). Motor limitation in dual-task processing under ballistic movement conditions. Psychological Science, 17, 788-793.
Manuscrito recibido el 14 de junio de 2011.
Aceptado el 15 de noviembre de 2011.
